GitHub - westonb/OV7670-Verilog: Verilog modules required to get the OV7670 camera working
GitHub - westonb/OV7670-Verilog: Verilog modules required to get the OV7670 camera working
Verilog modules required to get the OV7670 camera working - westonb/OV7670-Verilog
github.com
를 참고했다.
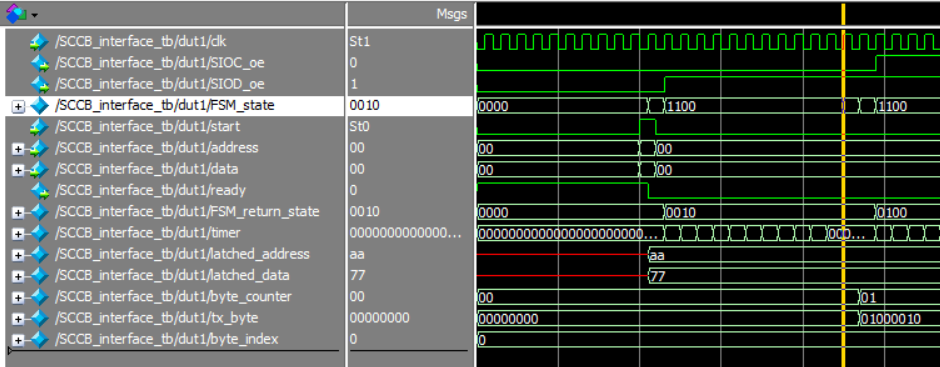
SCCB가 어떻게 움직이는지 보기 위해 modelsim 으로 SCCB_interface_tb.v 를 시뮬레이션 돌려 보았다.
봐야 할 코드 부분은 다음과 같다.
SCCB_interface
#(.CLK_FREQ(800), .SCCB_FREQ(20))
dut1
(
.clk(clk),
.start(start),
.address(address),
.data(data),
.ready(ready),
.SIOC_oe(SIOC_oe),
.SIOD_oe(SIOD_oe)
);
always #5 clk=~clk;
initial begin
clk = 0;
start = 0;
address = 0;
data = 0;
#100;
address = 8'hAA;
data = 8'h77;
start = 1;
#10;
start = 0;
address = 0;
data = 0;
end
시뮬레이션용으로 Clock freq를 800, bus freq를 20으로 설정해 뒀다.
클럭은 10ns 마다 pos edge 를 가진다.
처음 clk, start, address, data 가 0이고
100 ns 가 지나면 address에 AA, data에 77, 시작 값을 가진다.
그리고 그 후 10ns 가 지나면 start, address, data를 0으로 돌린다.
이런 경우 아마 내부에 ready 플래그를 둬서 start 입력에도 내부 동작이 끝나지 않았다면 동작하지 않게 만들 가능성이 크다.
SCCB interface 코드를 한 번 보도록 한다.
module SCCB_interface
#(
parameter CLK_FREQ = 25000000,
parameter SCCB_FREQ = 100000
)
(
input wire clk,
input wire start,
input wire [7:0] address,
input wire [7:0] data,
output reg ready,
output reg SIOC_oe,
output reg SIOD_oe
);
localparam CAMERA_ADDR = 8'h42;
localparam FSM_IDLE = 0;
localparam FSM_START_SIGNAL = 1;
localparam FSM_LOAD_BYTE = 2;
localparam FSM_TX_BYTE_1 = 3;
localparam FSM_TX_BYTE_2 = 4;
localparam FSM_TX_BYTE_3 = 5;
localparam FSM_TX_BYTE_4 = 6;
localparam FSM_END_SIGNAL_1 = 7;
localparam FSM_END_SIGNAL_2 = 8;
localparam FSM_END_SIGNAL_3 = 9;
localparam FSM_END_SIGNAL_4 = 10;
localparam FSM_DONE = 11;
localparam FSM_TIMER = 12;
initial begin
SIOC_oe = 0;
SIOD_oe = 0;
ready = 1;
end
reg [3:0] FSM_state = 0;
reg [3:0] FSM_return_state = 0;
reg [31:0] timer = 0;
reg [7:0] latched_address;
reg [7:0] latched_data;
reg [1:0] byte_counter = 0;
reg [7:0] tx_byte = 0;
reg [3:0] byte_index = 0;
always@(posedge clk) begin
case(FSM_state)
FSM_IDLE: begin
byte_index <= 0;
byte_counter <= 0;
if (start) begin
FSM_state <= FSM_START_SIGNAL;
latched_address <= address;
latched_data <= data;
ready <= 0;
end
else begin
ready <= 1;
end
end
FSM_START_SIGNAL: begin //comunication interface start signal, bring SIOD low
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_LOAD_BYTE;
timer <= (CLK_FREQ/(4*SCCB_FREQ));
SIOC_oe <= 0;
SIOD_oe <= 1;
end
FSM_LOAD_BYTE: begin //load next byte to be transmitted
FSM_state <= (byte_counter == 3) ? FSM_END_SIGNAL_1 : FSM_TX_BYTE_1;
byte_counter <= byte_counter + 1;
byte_index <= 0; //clear byte index
case(byte_counter)
0: tx_byte <= CAMERA_ADDR;
1: tx_byte <= latched_address;
2: tx_byte <= latched_data;
default: tx_byte <= latched_data;
endcase
end
FSM_TX_BYTE_1: begin //bring SIOC low and and delay for next state
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_TX_BYTE_2;
timer <= (CLK_FREQ/(4*SCCB_FREQ));
SIOC_oe <= 1;
end
FSM_TX_BYTE_2: begin //assign output data,
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_TX_BYTE_3;
timer <= (CLK_FREQ/(4*SCCB_FREQ)); //delay for SIOD to stabilize
SIOD_oe <= (byte_index == 8) ? 0 : ~tx_byte[7]; //allow for 9 cycle ack, output enable signal is inverting
end
FSM_TX_BYTE_3: begin // bring SIOC high
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_TX_BYTE_4;
timer <= (CLK_FREQ/(2*SCCB_FREQ));
SIOC_oe <= 0; //output enable is an inverting pulldown
end
FSM_TX_BYTE_4: begin //check for end of byte, incriment counter
FSM_state <= (byte_index == 8) ? FSM_LOAD_BYTE : FSM_TX_BYTE_1;
tx_byte <= tx_byte<<1; //shift in next data bit
byte_index <= byte_index + 1;
end
FSM_END_SIGNAL_1: begin //state is entered with SIOC high, SIOD high. Start by bringing SIOC low
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_END_SIGNAL_2;
timer <= (CLK_FREQ/(4*SCCB_FREQ));
SIOC_oe <= 1;
end
FSM_END_SIGNAL_2: begin // while SIOC is low, bring SIOD low
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_END_SIGNAL_3;
timer <= (CLK_FREQ/(4*SCCB_FREQ));
SIOD_oe <= 1;
end
FSM_END_SIGNAL_3: begin // bring SIOC high
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_END_SIGNAL_4;
timer <= (CLK_FREQ/(4*SCCB_FREQ));
SIOC_oe <= 0;
end
FSM_END_SIGNAL_4: begin // bring SIOD high when SIOC is high
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_DONE;
timer <= (CLK_FREQ/(4*SCCB_FREQ));
SIOD_oe <= 0;
end
FSM_DONE: begin //add delay between transactions
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_IDLE;
timer <= (2*CLK_FREQ/(SCCB_FREQ));
byte_counter <= 0;
end
FSM_TIMER: begin //count down and jump to next state
FSM_state <= (timer == 0) ? FSM_return_state : FSM_TIMER;
timer <= (timer==0) ? 0 : timer - 1;
end
endcase
end
endmodule
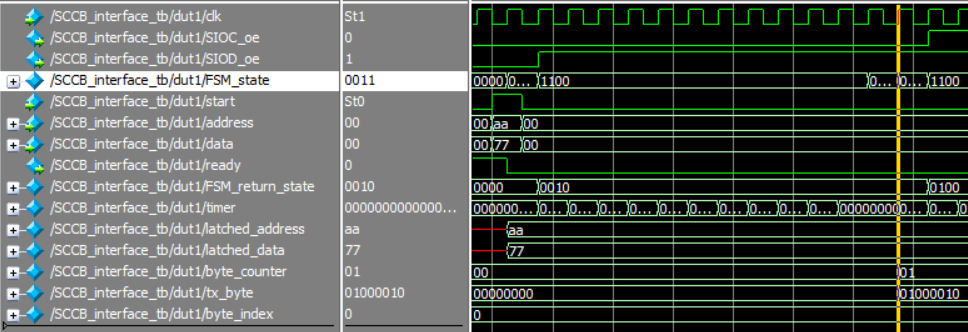
위의 테스트벤치에서 CLK_FREQ를 800, SCCB_FREQ를 20으로 제한했다.
initial begin
SIOC_oe = 0;
SIOD_oe = 0;
ready = 1;
end내부 파라미터는 넘어가고, SIOC_oe, SIOD_oe, ready 를 init 에서 할당해주고 있다. 순차적으로 안 해도 될 것 같은 부분이다.
State machine 을 한 번 본다.
FSM_IDLE: begin
byte_index <= 0;
byte_counter <= 0;
if (start) begin
FSM_state <= FSM_START_SIGNAL;
latched_address <= address;
latched_data <= data;
ready <= 0;
end
else begin
ready <= 1;
end
end
IDLE 상태에서 입력(start)이 들어오면 다음 상태로 변화시키는 코드다.
기본 값들은 초기화 혹은 리셋 시켜주면서, 입력이 들어오면 현재 address, data 를 레지스터에 저장한다.
뒤에서 이 값들(latched_address, latched_data)을 변화시키는 부분이 없었으므로 계속 값을 가져갈 것으로 보인다.
FSM_START_SIGNAL: begin //comunication interface start signal, bring SIOD low
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_LOAD_BYTE;
timer <= (CLK_FREQ/(4*SCCB_FREQ));
SIOC_oe <= 0;
SIOD_oe <= 1;
end
START_SIGNAL 부분은 IDLE에서 start 입력이 들어오면 다음 클럭에서 state가 변화되는 부분이다.
특이하게 return state 를 지정하고 있는데, 이는 다음 state 인 TIMER 로 인해 필요한 부분이다.
또, timer 는 FPGA의 클럭과 버스를 동기화하기 위해 사용하고,
SIOC_oe(SCL) 은 0을 유지하고, SIOD_oe(SDA) 는 1로 올라간다. 이는 SCCB의 start signal이다.
I2C 와 다른 인터페이스인 이유이기도 하다.

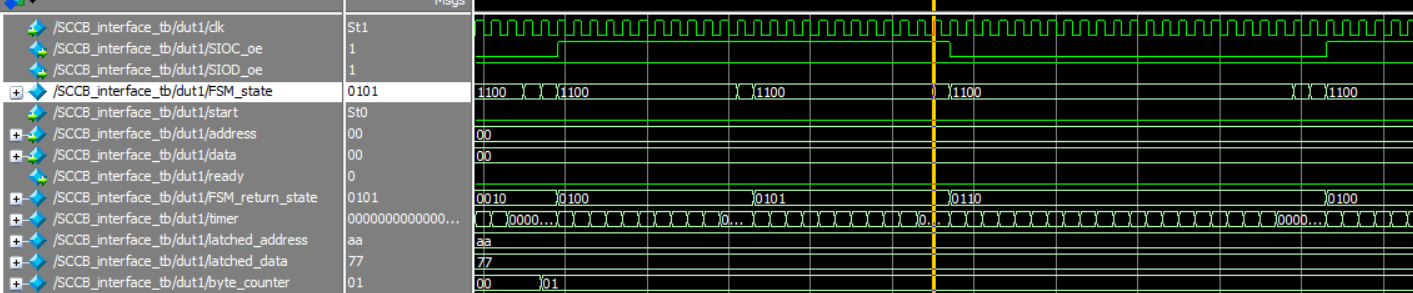
FSM_TIMER: begin //count down and jump to next state
FSM_state <= (timer == 0) ? FSM_return_state : FSM_TIMER;
timer <= (timer==0) ? 0 : timer - 1;
end
자주 등장하는 TIMER state 를 본다.
다른 건 없고, 시간 때우기 용으로 넣어 놓은 state 라고 보면 좋다.
timer 가 0이 될 때 까지 현재 상태를 유지하는데, 이 때 SCL, SDA 값도 유지된다.
위의 waveform 에서 FSM_state 가 1100(decimal 값으로 12)에서 길게 유지하는 것을 볼 수 있다.
실제로 파형을 보면 timer 이외에는 FSM_state 가 1100(binary) 인 때는 움직이지 않고 유지하는 것을 볼 수 있음.
timer가 0이 되어 return_state 로 돌아가도록 한다.
현재 return_state 는 FSM_LOAD_BYTE 로 지정되어 있다.
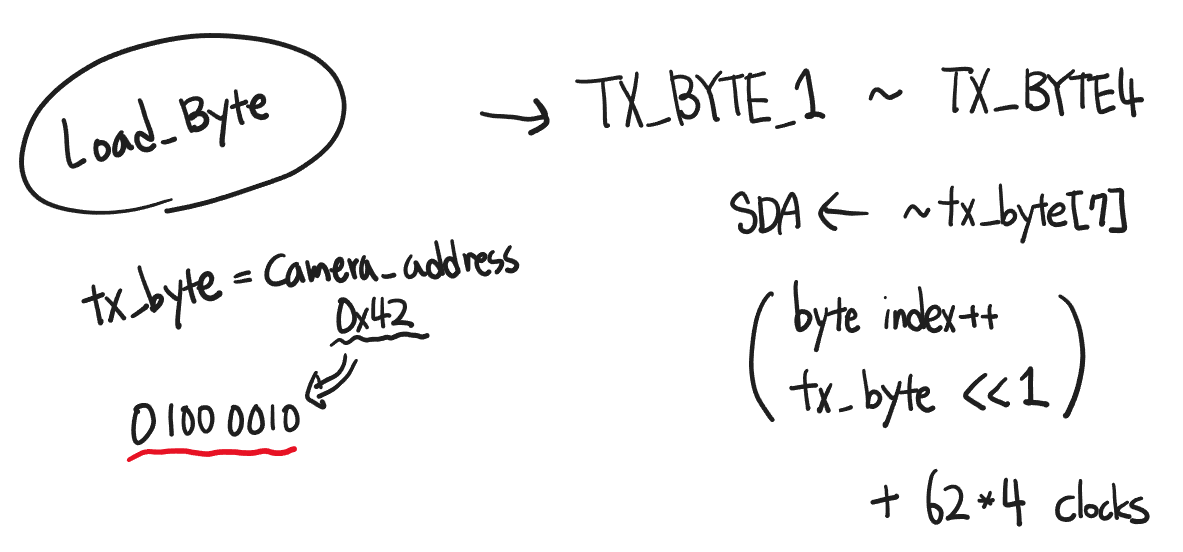
FSM_LOAD_BYTE: begin //load next byte to be transmitted
FSM_state <= (byte_counter == 3) ? FSM_END_SIGNAL_1 : FSM_TX_BYTE_1;
byte_counter <= byte_counter + 1;
byte_index <= 0; //clear byte index
case(byte_counter)
0: tx_byte <= CAMERA_ADDR;
1: tx_byte <= latched_address;
2: tx_byte <= latched_data;
default: tx_byte <= latched_data;
endcase
end
FSM_state 가 byte_counter 가 3이면 분기하는 조건이 있는걸 봐선 여기서 바이트 카운터를 올리는 것이 있던지, 다른 state 에서 바이트 카운터를 올리는 옵션이 있을 것이다.
실제로 다음 코드에서 바이트코드를 증가시키는 코드가 있다.
그리고 뭔지 모르겠지만 바이트 인덱스를 0으로 만든다. 다른 곳에서 바이트 인덱스를 사용하고 여기 다시 돌아와서 뭔가 한다는 의미일 확률이 높겠다.
그리고 바이트카운터에 따라서 tx_byte 의 값을 조정한다.
CAMERA_ADDR 은 localparam 에서 42로 지정했다.
현재 LOAD_BYTE 에서의 값은 다음과 같다.
현재 막 LOAD_BYTE에 도착했다.
다음 클럭에서 바뀌는 값들을 보도록 한다.
FSM_state 는 byte_counter 가 3이 아니므로(0임) FSM_TX_BYTE_1
byte_counter 은 다음 클럭에 1로
byte_index 는 다음 클럭에 0으로
tx_byte 는 다음 클럭에 CAMERA_ADDR 의 값을 가짐.
non-blocking(<=) 이기 때문에 순차적 처리가 아닌 병렬 처리를 함.
실제 다음 클럭의 값임.
이번에 온 TX_BYTE_1 을 살펴본다.
FSM_TX_BYTE_1: begin //bring SIOC low and and delay for next state
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_TX_BYTE_2;
timer <= (CLK_FREQ/(4*SCCB_FREQ));
SIOC_oe <= 1;
end
다음 클럭에 SCL 을 변화시킨다. 실제로 통신을 시작하려는 부분임.
이 부분에서 SCL = 1, SDA = 1 이 되므로 통신 시작, 이제 8비트의 데이터를 보내고 1비트의 ACK 를 수신해야 함.
하지만 다음 state 가 TIMER 로 다시 간다.
이로 인해 SCCB 인터페이스와 FPGA 사이의 클럭 차이가 굉장히 많이 나기 때문에 클럭 손실이 크다.
따라서 I2C 를 느려터진 인터페이스라고 하는 이유다.
현재 코드 상에서는 시뮬레이션이 아닌, 기기에서의 클럭을 25Mhz, SCCB freq 를 100Khz 로 정의해 놓았다.
timer 에서 SCCB 주파수에 4를 곱하는 이유는 아마 I2C 처럼 고속 모드(400Khz) 지원을 위함이지 싶다.
아무튼 저 값을 나누면 62.5 가 나오는데 소수 버림으로 62 가 나온다.
아무것도 안하고 벌써 62 클럭을 2번이나 낭비했다.
아무튼 return state 를 TX_BYTE_2 로 정의하고 다시 timer 에 갔다 온다.
FSM_TX_BYTE_2: begin //assign output data,
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_TX_BYTE_3;
timer <= (CLK_FREQ/(4*SCCB_FREQ)); //delay for SIOD to stabilize
SIOD_oe <= (byte_index == 8) ? 0 : ~tx_byte[7]; //allow for 9 cycle ack, output enable signal is inverting
end
timer 에 갔다 다시 돌아온 state 다.
근데 다음 state 가 다시 timer 이다.
여기서는 잘 보니, 한 바이트에 대해 처리하고 있는 것을 볼 수 있다.
SDA 에 byte index 가 8(9번째 비트, ACK) 가 아니면 tx_byte[7]을 반전시켜 넣고 있다.
return state 를 TX_BYTE_3으로 지정하고 다시 timer 로 간다. (62*3)
FSM_TX_BYTE_3: begin // bring SIOC high
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_TX_BYTE_4;
timer <= (CLK_FREQ/(2*SCCB_FREQ));
SIOC_oe <= 0; //output enable is an inverting pulldown
end
이번에도 다음 state 는 TIMER 이다.
여기서는 SCL 을 0으로 바꾼다.
다른 건 없다.
return state 를 TX_BYTE_4 로 지정하고 다음 timer 로 간다. (62*4)
FSM_TX_BYTE_4: begin //check for end of byte, incriment counter
FSM_state <= (byte_index == 8) ? FSM_LOAD_BYTE : FSM_TX_BYTE_1;
tx_byte <= tx_byte<<1; //shift in next data bit
byte_index <= byte_index + 1;
end
byte index 가 8이 아니면(ack) 다시 TX_BYTE_1 로 돌아간다. 아니면 LOAD_BYTE 로 간다.
tx_byte 는 하나 shift 하는데, 이는 이미 우리가 반전시킨 tx_byte[7] 을 SDA 로 보냈기 때문이다.
그리고 byte_index 를 1 증가시킨다.
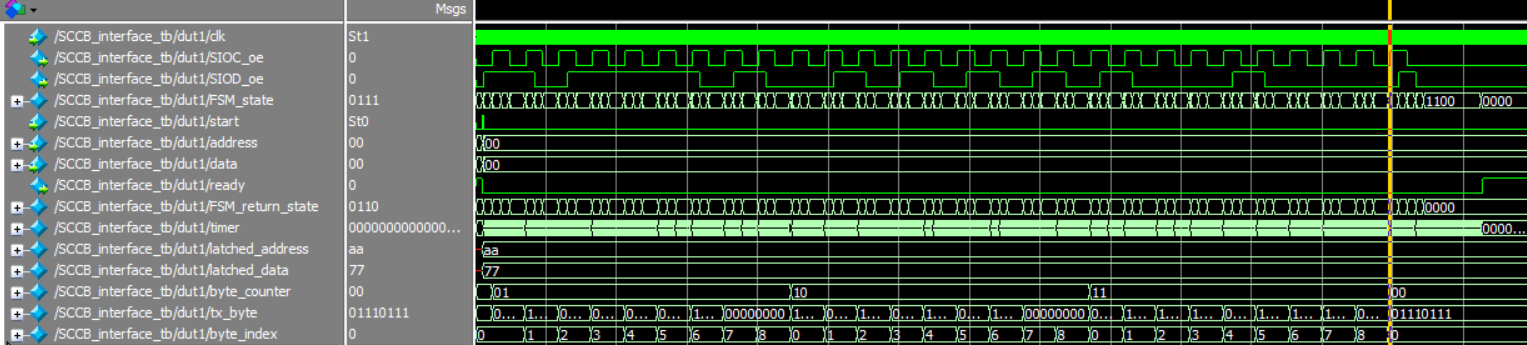
대략적으로 다음과 같은 구조가 되었다.
결국 TX_BYTE_1 ~ TX_BYTE_4 를 돌면서 1 Bit 를 보낸 것과 같다.
근데 TX_BYTE 에 사용한 클럭은
LOAD, TX1, TX2, TX3, TX4, TIMER*3 = 5 + 186 = 191 clock 이다.
25Mhz cpu 를 사용하면 7,640 ns = 7.64us 가 소요된 것이다.
이걸 이제 byte_index 가 8이 될 때 까지, 총 9번 실행해 준다.
그럼 이제 CAMERA_ADDRESS 를 SCCB interface 로 보내는 것이 완료 된 것이다.
그리고 다시 LOAD_BYTE 로 오게 된다.
byte_counter 에 따라, 3이 될 때 까지 반복한다. (기기 address, 내부 레지스터 address, 쓸 값)
3이 되었으면, END_SIGNAL_1 로 간다.
FSM_END_SIGNAL_1: begin //state is entered with SIOC high, SIOD high. Start by bringing SIOC low
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_END_SIGNAL_2;
timer <= (CLK_FREQ/(4*SCCB_FREQ));
SIOC_oe <= 1;
end
여기서는 통신을 종료하기 위해 STOP 시그널을 만드려는 쪽 같다.
SCL 을 1로 만든다.
return state 를 END_SIGNAL_2 로 지정하고, timer 로 간다.
파형으로 보면 저 위치이다.
자세하게 보면 이렇다.

FSM_END_SIGNAL_2: begin // while SIOC is low, bring SIOD low
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_END_SIGNAL_3;
timer <= (CLK_FREQ/(4*SCCB_FREQ));
SIOD_oe <= 1;
end
이번엔 SDA를 1로 만든다.
return state 를 END_SIGNAL_3 으로 지정하고 timer 로 간다.
파형은 다음과 같다.

FSM_END_SIGNAL_3: begin // bring SIOC high
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_END_SIGNAL_4;
timer <= (CLK_FREQ/(4*SCCB_FREQ));
SIOC_oe <= 0;
end
이번에 SCL 을 다시 0으로 만든다.
return state 를 END_SIGNAL_4 로 지정하고 timer 로 간다.
파형은 다음과 같다.

FSM_END_SIGNAL_4: begin // bring SIOD high when SIOC is high
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_DONE;
timer <= (CLK_FREQ/(4*SCCB_FREQ));
SIOD_oe <= 0;
end
마지막으로 SDA 를 0으로 내린다.
주석 적어놓은 거 보면 I2C 를 완전히 반대로 구현해 놓은 것과 동일한 것 같다.
timer 를 지나고, 마지막 done state 로 간다.
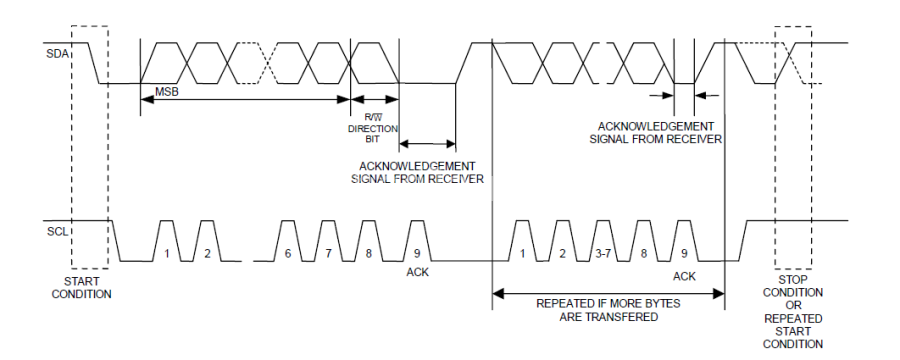
I2C를 보게 되면 마지막이 모두 HIGH로 끝나고, SCCB 는 정 반대이다.
FSM_DONE: begin //add delay between transactions
FSM_state <= FSM_TIMER;
FSM_return_state <= FSM_IDLE;
timer <= (2*CLK_FREQ/(SCCB_FREQ));
byte_counter <= 0;
end
Done state 는 다음 트랜잭션이 오기 전의 딜레이 역할을 한다.
딱히 byte_counter 를 초기화 안 해도 동작에는 지장이 없을 것 같다.(IDLE에서 초기화를 하기 때문)
시간이 저렇게 표기되어 있는데 작동에 준수해야 되는 최소 시간인지는 잘 모르겠다.
'Verilog' 카테고리의 다른 글
| [Verilog] maxpool2d w. line buffer (0) | 2024.10.31 |
|---|---|
| [Verilog] Conv2d w. line buffer (0) | 2024.10.30 |
| [Verilog] OV7670 카메라 모듈과 FPGA 통신 (0) | 2024.09.09 |
| [Verilog] OV7670 - more2 (0) | 2024.05.28 |
| [Verilog] SCCB Interface & OV7670 (0) | 2024.04.16 |